Bruiteurs moteur
|
Téléchargement
des dossiers complets
|
L’électrique
c’est
bien, le bruit d’un moteur c'est bien alors un
électrique avec un bruit de moteur s’approchant du réel
c’est encore bien mieux.
Après avoir exploré quelques solutions existantes du
commerce il faut se rendre à l’évidence, même à Hong
Kong les prix sont assez élevés, la voie
la plus économique et très intéressante est un module
Russe que l’on peut se procurer à l’adresse
suivante :
http://tpvelectronics.ucoz.ru/
Son prix sans ampli est de 35€ + 10€ de frais de port + 8.5€ (en 2012) de frais westernunion ou moneygram
(Voir ci-dessous)
Hi!
The engine module costs 35 euros. The gun
module costs 15 euros. The shipping is 10 euros.
It's possible to pay through westernunion or moneygram.
Best
regards
Après
tout
avec l’expérience de mon ancien métier j'ai tenter une
réalisation personnelle juste pour le « fun »
Bon il a eut des
galères car les choses ont bien évoluées… et mon seul et
unique neurone est très fatigué ......
Schéma électronique de la partie µP (testé mais pas complètement validé sur modèle réduit)
Schéma de l'ampli (testé OK)
|
Survolez la
photo
pour l' agrandir
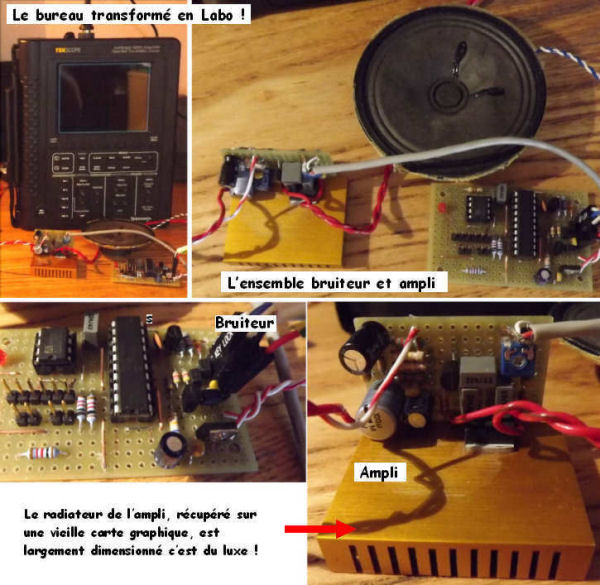 |
Réalisation
Suite à un premier prototype basé sur une
mémoire I2C mais trop limitée entaille et en
vitesse d’horloge une deuxième version vient
d'être réalisée.
En voici les principales caractéristiques Bruiteur moteur « réaliste » destiné aux modèles réduits d’avion électriques. -
Ce bruiteur utilise des échantillons de
« bruits » moteur réels. L'étape
suivante
consiste à réunir sur un même circuit la partie
µP et l'ampli,le schéma est réalisé et le
"routage" du circuit imprimé est pratiquement
terminé.
Cette version utilise un mixte entre composants CMS et composants traversant,la raison en est une plus grande facilité d'assemblage. Comparée à une solution tout CMS ce choix est compétitif car dans tous les cas il faut de la surface de radiateur pour refroidir l'amplificateur. Les dimension obtenues sont de 52 mm x 37 mm x 7.6 mm. |
5/01/2012
Une version plus élaborée est en cours,le logiciel à été
réécrit en langage C et des fonction supplémentaires ont
été ajoutées telles que :
Sons de mitrailleuse avec flash lumineux synchrone avec
les tirs.
Allumage des feux de piste.
Ce logiciel est opérationnel en simulation mais reste à
tester sur un prototype.
Une
évolution serait de pouvoir faire les mises à jour du
"firmware" ainsi que des sons via un PC et le bus USB,
je dois avouez que n'ayant jamais développé autour d'un
bus USB j'arrive à mon niveau d'incompétence mais je
persiste.
1/03/2013
Lors de l'équipement du PZL11 des essais de la
première version ont été réalisés, il en ressort que des
modifications logicielles sont à réaliser. En effet
ayant peu d'expérience dans la motorisation électrique
j'ai oublié que pendant l'initialisation du contrôleur
des excitations des sont effectuées pour créer la
séquence sonore. A l’initialisation du bruiteur il
sera nécessaire d’ajouter une temporisation.
En phase d’arrêt, il y a des
« hésitations » au moment du déclenchements.
Sans entrer dans les détails une légère
temporisation matérielle ou logicielle sera nécessaire,
en attendant je vais réaliser une "bidouille" externe au
module qui palliera au problème.
A terme ses petits défauts qui ne remettent absolument
pas le principe du bruiteur en cause devront être
corrigés. Pour l’instant il va vivre sa première
expérience de terrain ainsi.
Nota : Depuis que la version C-V1 est opérationnelle (voir page suivante) cette version obsolète n'est plus disponible au téléchargement
Suite
et
fin du bruiteur dans sa version de base, pour pallier
les défauts signalés plus haut une petite modification
matérielle à été effectué sur la version
Schéma
électronique
de la partie µP pour les spécialiste une
résistance de 10K à été ajoutée entre le collecteur de
Q2 et le condensateur C7. Ainsi les "glitch"
parasites
sont
filtrés. Néanmoins pour obtenir une meilleure marge de
protection, un filtrage logiciel sera aussi ajouté
sur la version future.
Pour
éviter des séquences non souhaitées liées aux
excitations sonores qui ont lieu pendant la phase
d'initialisation du contrôleur, une temporisation assez
longue à été ajoutée. Comme les tests du
contrôleur ne démarrent que si le TX/RX est opérationnel
ce délai est basé sur ce paramètre. Sur ma radio Futaba
T7C 2.4 Ghz associé à un RX « orange »la
période du RX est de 8ms, le son du bruiteur n’est
validé qu'après 1280 périodes soit environ 10 secondes.
Cette solution efficace, qui n’a demandé qu’une très
légère modification est limitée car elle a le
désavantage de ne pas être universelle. Pour éviter
cela, dans la prochaine version ce délai sera une durée
défini de 10s
qui ne commencera que si le TX/RX est opérationnel et
non dépendante de la période du RX.
Une
vidéo des essais à été réaliser, cette vidéo
est présente sur la
Page
Vidéo
1 2 3 4 5

